
Autonomous Robotics Vehicles
Publications on Autonomous Robotics Vehicles

Model Predictive Control for Self Driving Cars: A Case Study Using the Simulator CARLA within a ROS Framework
Daniel R Morais, A Pedro Aguiar ICARSC 2022 DOI: 10.1109/ICARSC55462.2022.9784788 Abstract(EN): Over the past few years, autonomous driving vehicles have […]
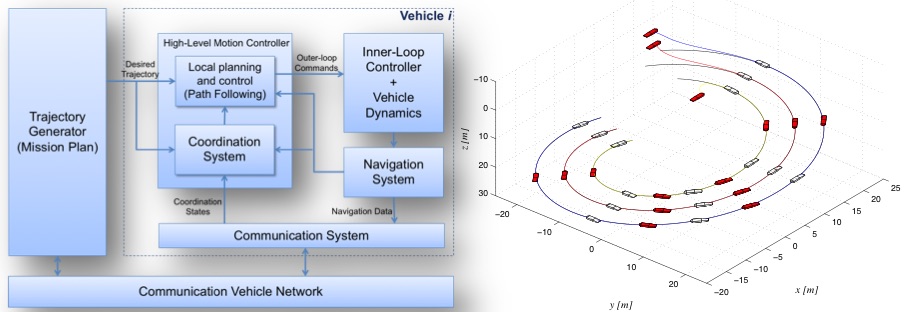
A Path-Following Controller for Marine Vehicles Using a Two-Scale Inner-Outer Loop Approach
Pramod Maurya, Helio Mitio Morishita, Antonio Pascoal, A. Pedro Aguiar Sensors (MDPI) DOI: 10.3390/s22114293 Abstract(EN): This article addresses the problem of […]
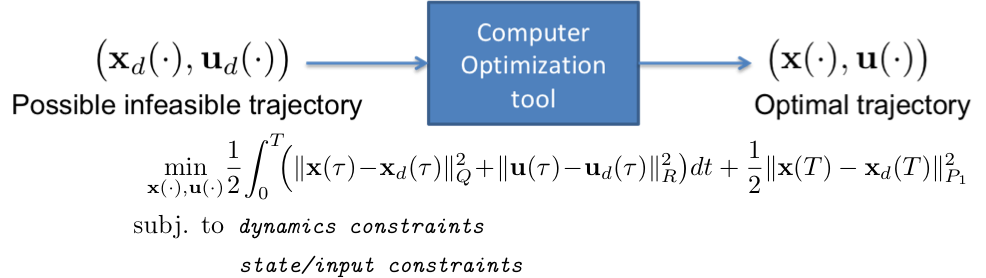
Energy-Optimal Motion Planning for Multiple Robotic Vehicles With Collision Avoidance
Hausler, AJ; Saccon, A; Aguiar, AP; Hauser, J; Pascoal, AM IEEE Transactions on Control Systems Technology ID Authenticus: P-00R-YR9 DOI: 10.1109/TCST.2015.2475399 Abstract:We […]
Moving Path Following for Unmanned Aerial Vehicles With Applications to Single and Multiple Target Tracking Problems
Oliveira, T; Aguiar, AP; Encarnacao, P IEEE Transactions on Robotics ID Authenticus: P-00K-VS8 DOI: 10.1109/tro.2016.2593044 Abstract: This paper introduces the moving path following […]
Safe Coordinated Maneuvering of Teams of Multirotor Unmanned Aerial Vehicles: A Cooperative Control Framework For Multivehicle, Time-Critical Missions
Cichella, V; Choe, R; Mehdi, SB; Xargay, E; Hovakimyan, N; Dobrokhodov, V; Kaminer, I; Pascoal, AM; Aguiar, AP IEEE CONTROL […]
Nonlinear Control and Estimation
Publications on Nonlinear Control and Estimation
Sliding Mode Fault-Tolerant Controller for Overactuated Electric Vehicles with Active Steering
Lopes, A; Rui Esteves Araújo; Aguiar, AP; Maria do Rosário de Pinho IECON Proceedings (Industrial Electronics Conference) ID Authenticus: P-00M-CR2 DOI: 10.1109/iecon.2016.7793205 […]
On the Design of Discrete-Time Economic Model Predictive Controllers
Alessandretti, A; Aguiar, AP; Jones, CN 2016 IEEE 55th Conference on Decision and Control, CDC 201 ID Authenticus: P-00M-DYJ DOI: 10.1109/cdc.2016.7798749 Abstract: This […]
Input-to-State-Stability Approach to Economic Optimization in Model Predictive Control
Alessandretti, A; Aguiar, AP; Jones, CN IEEE Transactions on Automatic Control ID Authenticus: P-00N-697 DOI: 10.1109/tac.2017.2700388 Abstract: This paper presents a model predictive […]
A Nonlinear Model Predictive Control for an AUV to Track and Estimate a Moving Target Using Range Measurements
Jain, RP; Alessandretti, A; Aguiar, AP ; de Sousa, JB ROBOT 2017: Third Iberian Robotics Conference – Volume 1, Seville, […]
Model Predictive Cloud-based Control Scheme for Trajectory-Tracking: Effects of Round-trip Time Over-estimates
Andrea Alessandretti (Autor) (Outra); António Pedro Aguiar 2018 13TH APCA INTERNATIONAL CONFERENCE ON CONTROL AND SOFT COMPUTING (CONTROLO) ID Authenticus: P-00P-YAK […]
Optimization-Based and Optimal Control
Publications on Optimization-Based and Optimal Control
Second-Order-Optimal Minimum-Energy Filters on Lie Groups
Saccon, A; Trumpf, J; Mahony, R; Aguiar, AP IEEE Transactions on Automatic Control ID Authenticus: P-00M-57F DOI: 10.1109/tac.2015.2506662 Abstract: Systems on Lie groups […]
On convergence and Performance Certification of a Continuous-time Economic Model Predictive Control Scheme with Time-varying Performance Index
Alessandretti, A; Aguiar, AP; Jones, CN AUTOMATICA ID Authenticus: P-00K-93B DOI: 10.1016/j.automatica.2016.01.020 Abstract: This paper addresses the design of convergence and performance certified […]
On the Design of Discrete-Time Economic Model Predictive Controllers
Alessandretti, A; Aguiar, AP; Jones, CN 2016 IEEE 55th Conference on Decision and Control, CDC 201 ID Authenticus: P-00M-DYJ DOI: 10.1109/cdc.2016.7798749 Abstract: This […]
Design of a Distributed Quantized Luenberger Filter for Bounded Noise
Rego, FFC; Pu, Y; Alessandretti, A; Aguiar, AP; Pascoal, AM; Jones, CN 2016 AMERICAN CONTROL CONFERENCE (ACC) ID Authenticus: P-00M-HJC DOI: 10.1109/acc.2016.7526675 […]
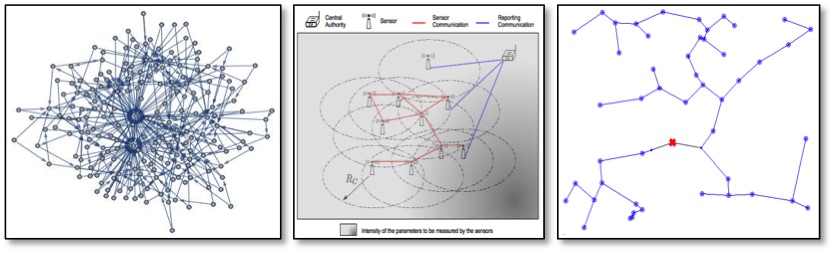
Large-Scale Distributed Systems
Publications on Large-Scale Distributed Systems
An overview of structural systems theory
Guilherme Ramos; A. PedroAguiar; Sérgio Pequito Automatica DOI: https://doi.org/10.1016/j.automatica.2022.110229 Abstract(EN): This paper provides an overview of the research conducted in […]
Minimum Cost Input/Output Design for Large-scale Linear Structural Systems
Pequito, S; Kar, S; Aguiar, AP AUTOMATICA ID Authenticus: P-00K-92Z DOI: 10.1016/j.automatica.2016.02.005 Abstract: In this paper, we provide optimal solutions to two different […]
A Framework for Structural Input/Output and Control Configuration Selection in Large-Scale Systems
Pequito, S; Kar, S; Aguiar, AP IEEE Transactions on Automatic Control ID Authenticus: P-00K-7VH DOI: 10.1109/tac.2015.2437525 Abstract: This paper addresses problems on the […]
A Distributed Model Predictive Control Scheme for Coordinated Output Regulation
Alessandretti, A; Aguiar, AP 20th World Congress of the International-Federation-of-Automatic-Control (IFAC) ID Authenticus: P-00N-4YW DOI: 10.1016/j.ifacol.2017.08.1550 Abstract: This paper addresses the coordinated output […]
Coordinated Efficient Buoys Data Collection in Large Complex Coastal Environments using UAVs
J. Braga; F. Balampanis; Aguiar, AP; João Tasso Sousa; I. Maza; A. Ollero Proceedings of the OCEANS 2017 MTS/IEEE Anchorage, […]
Machine Learning-Based Systems
Publications on Machine Learning-Based Systems
A Secure Federated Deep Learning-Based Approach for Heating Load Demand Forecasting in Building Environment
Moradzadeh, A.; Moayyed, H.; Mohammadi Ivatloo, B.; Aguiar, AP. ; Anvari Moghaddam, A. IEEE Acces ID Authenticus: P-00V-ZNM DOI: 10.1109/access.2021.3139529 Abstract (EN): Recently, […]
Adaptive Sampling Using an Unsupervised Learning of GMMs Applied to a Fleet of AUVs with CTD Measurements
Khoshrou, A; Aguiar, AP; Fernando Lobo Pereira ROBOT 2015: SECOND IBERIAN ROBOTICS CONFERENCE: ADVANCES IN ROBOTICS, VOL 1 ID Authenticus: P-00K-2BZ […]
Real-Time Outlier Detection Applied to a Doppler Velocity Log Sensor Based on Hybrid Autoencoder and Recurrent Neural Network
Davari, N; Aguiar, AP IEEE JOURNAL OF OCEANIC ENGINEERING ID Authenticus: P-00T-QWZ DOI: 10.1109/joe.2021.3057909 Abstract: This article presents a real-time outlier detection deep-learning […]
Deep Learning-Assisted Short-Term Load Forecasting Forsustainable Management of Energy in Microgrid
Arash Moradzadeh; Hamed Moayyed; Sahar Zakeri; Behnam Mohammadi-Ivatloo; António Pedro Aguiar MDPI Inventions ID Authenticus: P-00T-D3G DOI: 10.3390/inventions6010015 Abstract (EN): Nowadays, supplying demand […]