
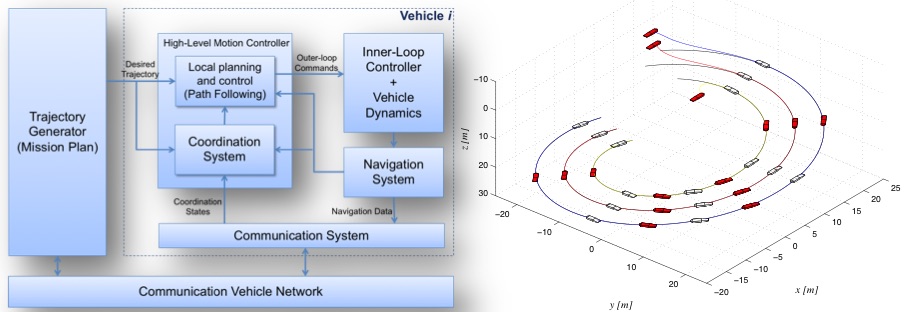
Autonomous Robotics Vehicles
Publications on Autonomous Robotics Vehicles

Energy-Optimal Motion Planning for Multiple Robotic Vehicles With Collision Avoidance
Hausler, AJ; Saccon, A; Aguiar, AP ; Hauser, J; Pascoal, AM IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY ID Authenticus: P-00G-VTR DOI: 10.1109/tcst.2015.2475399 […]
Range-Based Underwater Vehicle Localization in the Presence of Unknown Ocean Currents: Theory and Experiments
Bayat, M; Crasta, N; Aguiar A., P; Pascoal A., M IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY ID Authenticus: P-00G-MT2 DOI: 10.1109/tcst.2015.2420636 Abstract: This […]
Towards 3-D Distributed Odor Source Localization: An Extended Graph-Based Formation Control Algorithm for Plume Tracking
Soares, JM; Marjovi, A; Giezendanner, J; Kodiyan, A; Aguiar, AP; Pascoal, AM; Martinoli, A 2016 IEEE/RSJ International Conference on Intelligent […]
An Algorithm for Formation-Based Chemical Plume Tracing Using Robotic Marine Vehicles
Soares, JM ; Aguiar, AP; Pascoal, AM; Martinoli, A OCEANS 2016 MTS/IEEE Monterey, OCE 2016 ID Authenticus: P-00M-PRN DOI: 10.1109/oceans.2016.7761119 Abstract: Robotic chemical […]
A Moving Path Following Approach for Trajectory Optimization of UAVs: An application for target tracking of marine vehicles
Rucco, A (Autor) (Outra); Aguiar, AP (Autor) (FEUP); Fernando Lobo Pereira (Autor) (FEUP); João Tasso Sousa 2016 European Control Conference, […]
Nonlinear Control and Estimation
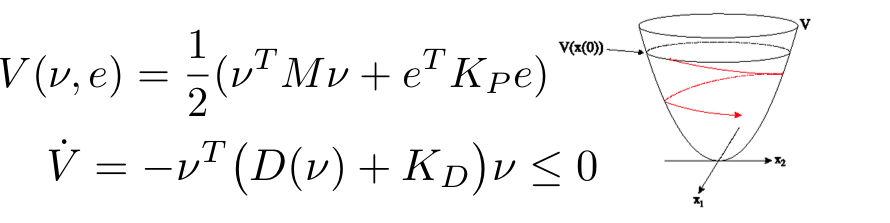
Publications on Nonlinear Control and Estimation
Moving path following control of constrained underactuated vehicles: A nonlinear Model Predictive Control Approach
R. Praveen Jain; Andrea Alessandretti ; António Pedro Aguiar; João Borges de Sousa. AIAA Information Systems-AIAA Infotech at Aerospace, 2018 […]
Finite-dimensional Control of Linear Discrete-time Fractional-order Systems
Alessandretti, A; Pequito, S; Pappas, GJ; Aguiar, AP. AUTOMATICA ID Authenticus: P-00R-QFV DOI: 10.1016/j.automatica.2019.108512 Abstract: This paper addresses the design of finite-dimensional feedback […]
Distributed MPC control of a Water Delivery Canal based on D-ADMM
João P. Belfo; João M. Lemos ; António Pedro Aguiar 2020 28th Mediterranean Conference on Control and Automation (MED) ID […]
Optimization-Based and Optimal Control
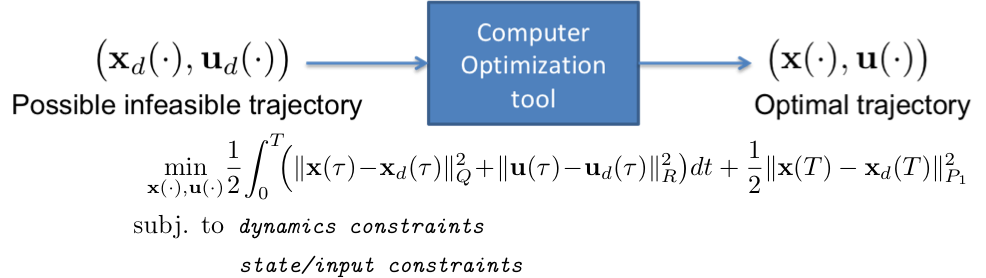
Publications on Optimization-Based and Optimal Control
The Robust Minimal Controllability Problem
Pequito, S; Ramos, G; Kar, S; Aguiar, AP; Ramos, J AUTOMATICA ID Authenticus: P-00M-TXZ DOI: 10.1016/j.automatica.2017.04.053 Abstract: In this paper, we address the […]
Input-to-State-Stability Approach to Economic Optimization in Model Predictive Control
Alessandretti, A; Aguiar, AP; Jones, CN IEEE Transactions on Automatic Control ID Authenticus: P-00N-697 DOI: 10.1109/tac.2017.2700388 Abstract: This paper presents a model predictive […]
Composability and Controllability of Structural Linear Time-invariant Systems: Distributed Verification
Carvalho, JF; Pequito, S; Aguiar, AP; Kar, S; Johansson, KH AUTOMATICA ID Authenticus: P-00M-E6Z DOI: 10.1016/j.automatica.2016.12.016 Abstract: Motivated by the development and deployment […]
A Design Method for Distributed Luenberger Observers
Rego, FFC; Aguiar, AP; Pascoal, AM; Jones, CN 2017 IEEE 56TH ANNUAL CONFERENCE ON DECISION AND CONTROL (CDC) ID Authenticus: P-00N-MR9 […]
Large-Scale Distributed Systems
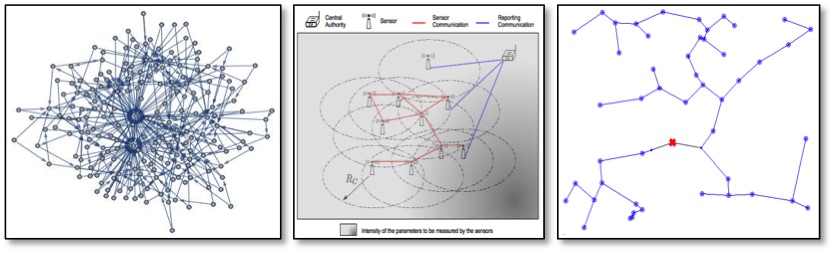
Publications on Large-Scale Distributed Systems
Structurally Observable Distributed Networks of Agents Under Cost and Robustness Constraints
Stephen Kruzick ; Sergio Pequito; Soummya Kar; José M. F. Moura; António Pedro Aguiar. IEEE TRANSACTIONS ON SIGNAL AND INFORMATION […]
Distributed State Estimation for Discrete-time Linear Time Invariant Systems: A survey
Rego, FFC; Pascoal, AM; Aguiar, AP; Jones, CN. ANNUAL REVIEWS IN CONTROL ID Authenticus: P-00R-2AN DOI: 10.1016/j.arcontrol.2019.08.003 Abstract: Motivated by the increasing availability […]
Convergence of a Distributed Optimal Control Coordination Method via the Small-Gain Theorem
António Pedro Aguiar; João Belfo; João Lemos. 15th European Workshop on Advanced Control and Diagnosis, ACD 2019
Multi-agent Detection and Labelling of Activity Patterns
Ana Portêlo; António Pedro Aguiar; João M. Lemos. Signal Image and Video Processing ID Authenticus: P-00R-VQW DOI: 10.1007/s11760-020-01659-7 Abstract: We address the problem […]
Structurally Quotient Fixed Modes
Ramos, G; Aguiar, AP; Pequito, S Systems and Control Letters ID Authenticus: P-00T-SM4 DOI: 10.1016/j.sysconle.2021.104914 Abstract (EN): We provide a necessary and sufficient […]
Machine Learning-Based Systems
Publications on Machine Learning-Based Systems