
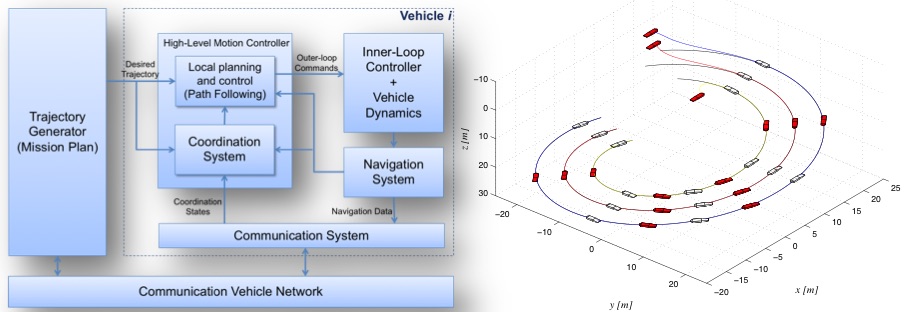
Autonomous Robotics Vehicles
Publications on Autonomous Robotics Vehicles

A Convoy Protection Strategy Using the Moving Path Following Method
Oliveira, T (Autor) (Outra); Aguiar, AP (Autor) (FEUP); Encarnacao, P 2016 International Conference on Unmanned Aircraft Systems, ICUAS 2016 ID […]
Optimal UAV rendezvous on a UGV
Rucco, A; Sujit, PB; Aguiar, AP; Sousa, JB 2016 AIAA Guidance, Navigation, and Control Conference ID Authenticus: P-00K-601 DOI: 10.2514/6.2016-0895 Abstract: An important […]
A Graph-Based Formation Algorithm for Odor Plume Tracing
Soares, JM; Aguiar, AP; Pascoal, AM; Martinoli, A 12th International Symposium on Distributed Autonomous Robotic Systems (DARS) ID Authenticus: P-00K-50R DOI: 10.1007/978-4-431-55879-8_18 […]
Adaptive Sampling Using an Unsupervised Learning of GMMs Applied to a Fleet of AUVs with CTD Measurements
Khoshrou, A; Aguiar, AP; Fernando Lobo Pereira ROBOT 2015: SECOND IBERIAN ROBOTICS CONFERENCE: ADVANCES IN ROBOTICS, VOL 1 ID Authenticus: P-00K-2BZ […]
A Predictive Path-Following Approach for Fixed-Wing Unmanned Aerial Vehicles in Presence of Wind Disturbances
Rucco, A; Aguiar, AP; Fernando Lobo Pereira; João Tasso Sousa ROBOT 2015: SECOND IBERIAN ROBOTICS CONFERENCE: ADVANCES IN ROBOTICS, VOL […]
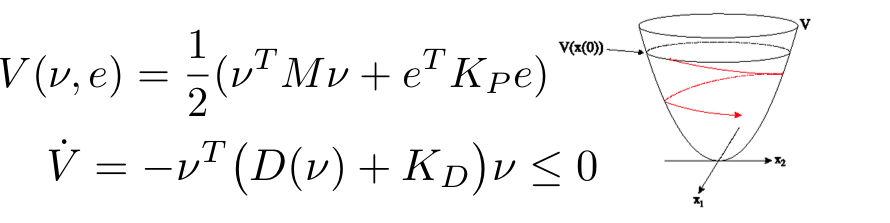
Nonlinear Control and Estimation
Publications on Nonlinear Control and Estimation
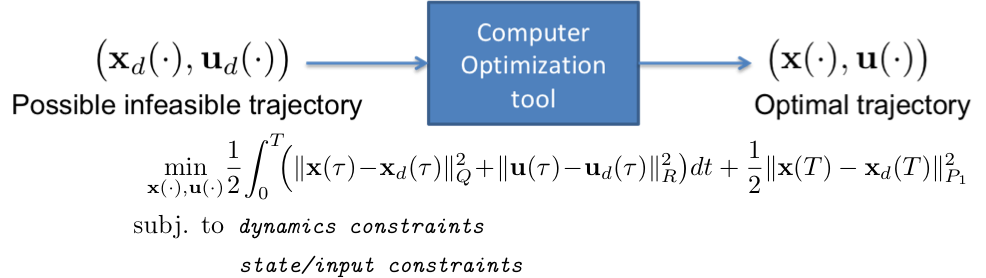
Optimization-Based and Optimal Control
Publications on Optimization-Based and Optimal Control
Constrained optimal motion planning for autonomous vehicles using PRONTO
Aguiar, AP; Bayer, FA ; Hauser, J ; Häusler, AJ ; Notarstefano, G; Pascoal, AM ; Rucco, A Workshop on […]
Optimal Rendezvous Trajectory for Unmanned Aerial-Ground Vehicles
Alessandro Rucco;; António Pedro Aguiar; Sujit Baliyarasimhuni; João Borges de Sousa, Fernando Lobo Pereira. IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC […]
Cooperative Joint Estimation and Localization using Mobile Multi-agent Systems: A Minimum Energy Estimator Approach
T. Ngoc Ha; António Pedro Aguiar. 2018 EUROPEAN CONTROL CONFERENCE (ECC) ID Authenticus: P-00Q-3EV DOI: 10.23919/ecc.2018.8550053 Abstract: This paper investigates the problem of […]
Localization of an Acoustic Fish-Tag using the Time-of-Arrival Measurements: Preliminary results using eXogenous Kalman Filter
R. Praveen Jain; A. Pedro Aguiar; João Borges de Sousa; Artur Zolich; Tor Arne Johansen; Jo Arve Alfredsen. IEEE International […]
Large-Scale Distributed Systems
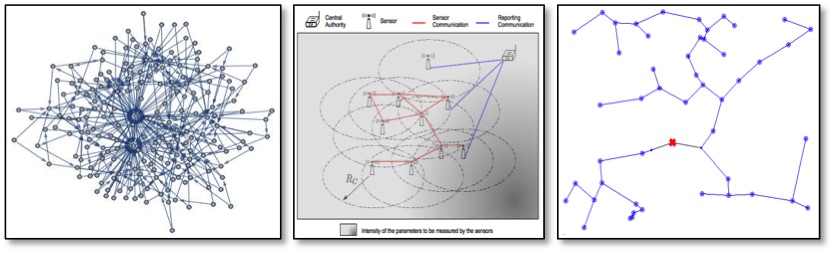
Publications on Large-Scale Distributed Systems
Distributed Inverse Optimal Control for Discrete-Time Nonlinear Multi-Agent Systems
Belfo, JP; Aguiar, AP; Lemos, JM IEEE CONTROL SYSTEMS LETTERS ID Authenticus: P-00T-QPA DOI: 10.1109/lcsys.2021.3050093 Abstract (EN): This paper describes a robust distributed […]
Distributed LQ Control of a Water Delivery Canal Based on a Selfish Game
Belfo, JP; Lemos, JM; Aguiar, AP Pages: 466-47614th APCA International Conference on Automatic Control and Soft Computing, CONTROLO 2020 1 July […]
Machine Learning-Based Systems
Publications on Machine Learning-Based Systems