
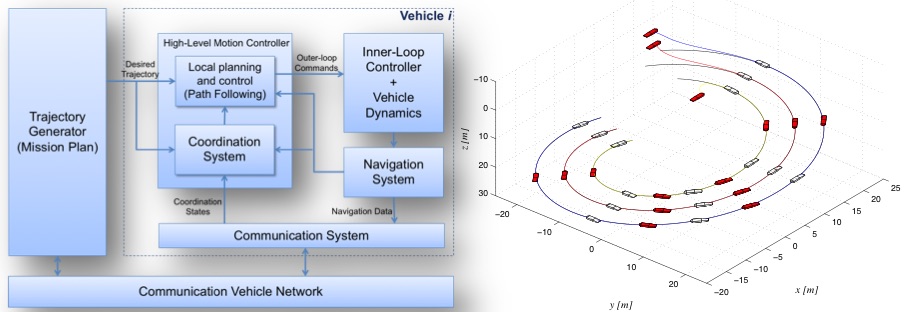
Autonomous Robotics Vehicles
Publications on Autonomous Robotics Vehicles

Self-Triggered Cooperative Path Following Control of Fixed Wing Unmanned Aerial Vehicle
Jain, RP; Aguiar, A; João Tasso Sousa 2017 International Conference on Unmanned Aircraft Systems, ICUAS 2017 ID Authenticus: P-00N-9QY DOI: 10.1109/icuas.2017.7991375 Abstract: Formation […]
A Fault Detection and Isolation Scheme for Formation Control of Fixed-wing UAVs
Sequeira, P; Aguiar, AP 2017 International Conference on Unmanned Aircraft Systems, ICUAS 2017 ID Authenticus: P-00N-95A DOI: 10.1109/icuas.2017.7991454 Abstract: This paper presents an […]
VirtualArena: An Object-Oriented MATLAB Toolkit for Control System Design and Simulation
Alessandretti, A; Aguiar, AP; Jones, CN 2017 International Conference on Unmanned Aircraft Systems, ICUAS 2017 ID Authenticus: P-00N-95E DOI: 10.1109/icuas.2017.7991423 Abstract: This paper […]
Feature Based Potential Field for Low-Level Active Visual Navigation
Rodrigues, RT; Basiri, M; Aguiar, AP; Miraldo, P ROBOT 2017: Third Iberian Robotics Conference – Volume 1, Seville, Spain, November […]
Coordinated Efficient Buoys Data Collection in Large Complex Coastal Environments using UAVs
J. Braga; F. Balampanis; Aguiar, AP; João Tasso Sousa; I. Maza; A. Ollero Proceedings of the OCEANS 2017 MTS/IEEE Anchorage, […]
Nonlinear Control and Estimation
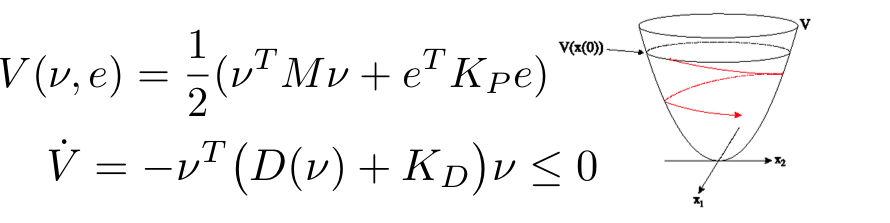
Publications on Nonlinear Control and Estimation
Optimization-Based and Optimal Control
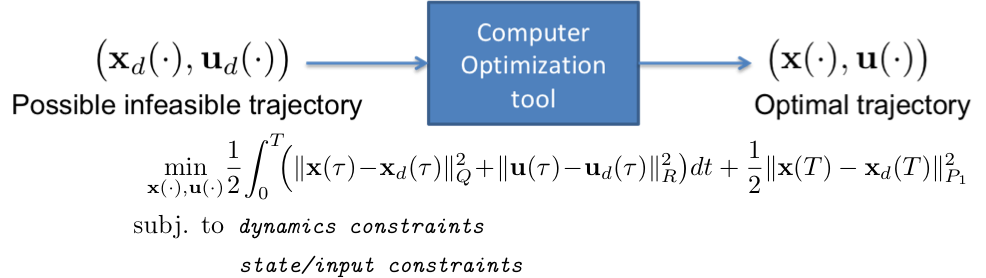
Publications on Optimization-Based and Optimal Control
Large-Scale Distributed Systems
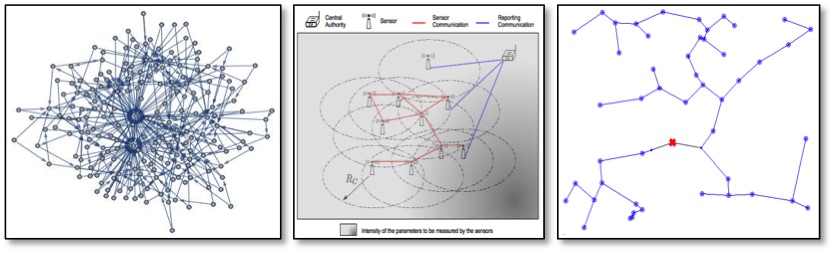
Publications on Large-Scale Distributed Systems
Machine Learning-Based Systems
Publications on Machine Learning-Based Systems